Additional information for processed data#
This page provide information on some aspects of processed data that may require additional explanation to fully understand the representation and underlying operations.
Range of echo samples#
The calibration operation in compute_Sv generates a new data variable, echo_range, which is the physically meaningful range (in meters) of the echo samples.
echo_range is compute from the range_sample coordinate (which contains 0-based indices of the digitized sample numbers of the received echoes) of the raw data in combination with the sample_interval in the Sonar/Beam_groupX group and sound speed either stored in the raw data file or provided by the user.
Echopype assumes a constant sound and does not currently support the use a sound speed profile.
The computation for echo_range (\(r\)) is:
where \(\Delta r\) is the along-range “length” of each sample, \(N\) is the index number in range_sample, \(\tau\) is the sample_interval, and \(c\) is sound speed. The factor of 2 is due to the round-trip travel from the transmitter to the scatterer and back to the receiver.
Because sample_interval can be different for different channels, the resulting echo_range arrays can be different across channel even if they have the same number of digitized samples. This is illustrated in the sketch below, in which (A) shows the dimensions of the variable backscatter_r and (B) shows the varying values of echo_range that change depending on sample_interval. In this example, the sample_interval of the first channel is twice of that of the second and the third channel.

Vertical coordinate (z-axis) variables#
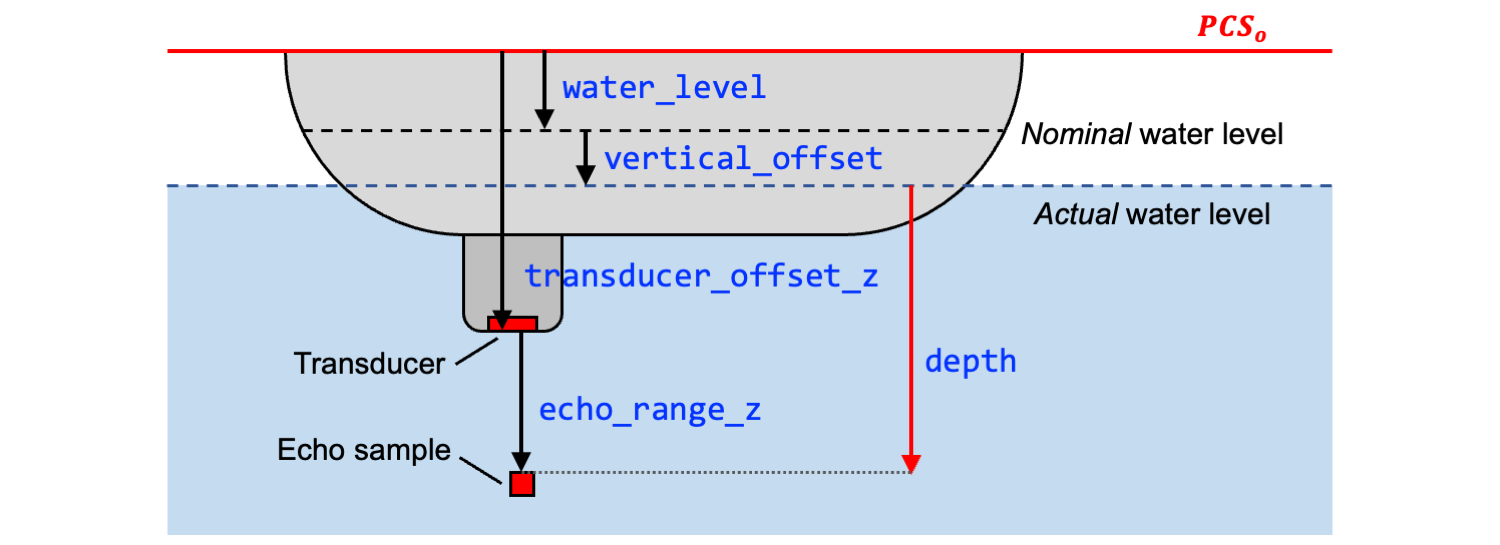
The SONAR-netCDF4 v1 convention defines several variables in the Platform group that are referenced to a common Platform Coordinate System (PCS) vertical (z-axis) origin, \({PCS}_o\). These variables, when available, enable the calculation of the depth of each echo sample from the water surface. These variables are listed below together with their definitions, with edits when appropriate.
The z axis is positive-down from the platform origin \({PCS}_o\), and all variables except for vertical_offset are defined with respect to \({PCS}_o\). All variables are in units meters.
water_level: Distance from the \({PCS}_o\) to the nominal (fixed) water level measured along the z-axis of the platform coordinate system (positive values are below the origin).vertical_offset: Time-varying distance from the nominal water level to the actual water level measured along the z-axis of the platform coordinate system (positive values are when the actual water level is below the nominal water level). For ships and similar platforms, this is heave, but the concept applies equally well to underwater vehicle depth.MRU_offset_z: Distance along the z-axis from \({PCS}_o\) to the motion reference unit (MRU) sensor origin.position_offset_z: Distance along the z-axis from \({PCS}_o\) to the latitude/longitude sensor origin.transducer_offset_z: Distance along the z-axis from \({PCS}_o\) to the sonar transducer.
Using these variables, the depth of the transducer with respect to the actual water level can be calculated as:
transducer_depth = transducer_offset_z - water_level - vertical_offset
and the depth for a given echo sample is:
depth = transducer_depth + echo_range_z
where echo_range_z is the z-axis component (positive down) of echo_range.
The sketch below shows the relationship between the above vertical coordinate (z-axis) variables.
To compute the sample depth, when the transducer points vertically, echo_range_z = echo_range (transducer points down) or echo_range_z = -echo_range (transducer points up). When the transducer is mounted with an angle to the vertical axis, the beam direction vector (defined by the variables beam_direction_x, beam_direction_y, beam_direction_z in the Sonar/Beam_groupX group) should be used together with echo_range to calculate echo_range_z.
For an echosounder in an underwater vehicle or moored on the seabed, a pressure sensor will provide the reference, time-varying depth. In this case:
\({PCS}_o\) corresponds to the position of the pressure sensor
water_levelas defined by the convention is unnecessary and can be set to 0vertical_offset = -pressure_sensor_depth